

Breve introducción a nuestras maneras de desarrollo no colonizadoras
El desarrollo de nuestra postura sobre la creación de algoritmos no colonizadores tiene su base en nuestra praxis social solidaria. El conocimiento adquirido en la praxis social lo aplicamos al desarrollo de software, asegurando una relación dialéctica entre administradores y usuarios que permita evitar el ejercicio de dominio por parte de quienes desarrollamos la aplicación o desde nuestros propios contextos. Por supuesto, siempre teniendo en cuenta las opciones disponibles para hacer posible su desarrollo. Siempre existe una tensión entre lo posible y la idealización de lo posible.
En lo referente al desarrollo del software, debe predominar la idea de no “cerrar posibilidades o contextos”; es decir, no predefinirlos de manera tal que no puedan ser replanteados por un usuario o administrador desde su propia área de conocimiento, la cual no debería ser la de un programador experto, sino la de un usuario calificado.
Cuando nos paramos en ronda, mirándonos los rostros, podemos tomar decisiones colectivas respetando la dignidad de cada uno de manera equitativa. Es necesario respetar tanto la individualidad como lo colectivo; es decir, las necesidades de cada grupo o persona y su relación con la estructura, que se regenera a partir de la preexistente. Si la estructura se cierra, se fosiliza o se organiza sin opciones de transformación, entonces se vuelve opresiva.
Queremos recordar que el propósito no es simular a una persona indigente. Más bien, la intención es reproducir la praxis social propia de la relación entre un acompañante y la representación de un indigente.
Asimismo, cuando hablamos de indigente, nos referimos a un integrante de la gran comunidad de la Familia de la Calle. Este integrante puede ser una persona que tenga un hogar o que no lo tenga. Con frecuencia, las personas reducen esta comunidad únicamente a quienes se encuentran en situación de calle. Sin embargo, esto es un error, ya que dicha comunidad también puede estar conformada por personas que tienen una casa donde vivir, así como por personas que no la tienen.
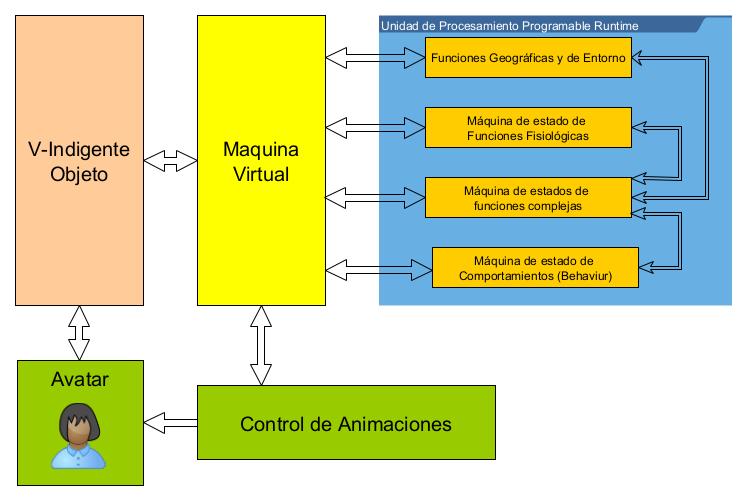
Las novedades en la activación y desactivación programable de sistemas de control y simulación de comportamientos y funciones fisiológicas de los V-indigentes (indigentes virtuales)
Si bien no podemos eludir que el procesamiento en un computador es secuencial, la implementación de máquinas virtuales para la simulación y control de procesos internos del v-indigente permite la ejecución paralela de distintas estructuras de procesamiento, como si estos procesos fueran simultáneos.
Es importante contar con la posibilidad de habilitar y deshabilitar de manera parcial o total los sistemas de simulación completa. Esto permite simplificar dichos sistemas, así como reducir el procesamiento de datos durante la simulación.
Para ello hemos agregado la posibilidad de que un sistema disponga de variables de habilitación y deshabilitación.
Variables Específicas de Control
Estas variables tienen como función habilitar o deshabilitar un Proceso o un Autómata y hasta todo un SimulatedSystem (Sistema de simulación).
Estas variables tienen nombres reservados dependiendo del fin que tendrán las mismas. Podrán llamarse: EnableAutomaton , EnableProcess o EnableSystem.
¿Cuándo se usan unas u otras?
EnableAutomaton o EnableProcess : Cuando están en true o su valor es mayor a 0, el autómata o proceso al que pertenecen está habilitado o viceversa. Al actualizarse la variable, el Automaton (procesos y autómatas) que la contiene se habilita o deshabilita, ejecutando procesos internos de Enable() y Disable()
EnableSystem: Cuando están en true o su valor es mayor a 0, el SimulatedSystem al que pertenecen está habilitado o viceversa. Al actualizarse la variable, el SimulatedSystem se habilita o deshabilita ejecutando sus métodos internos de Enable() y Disable()
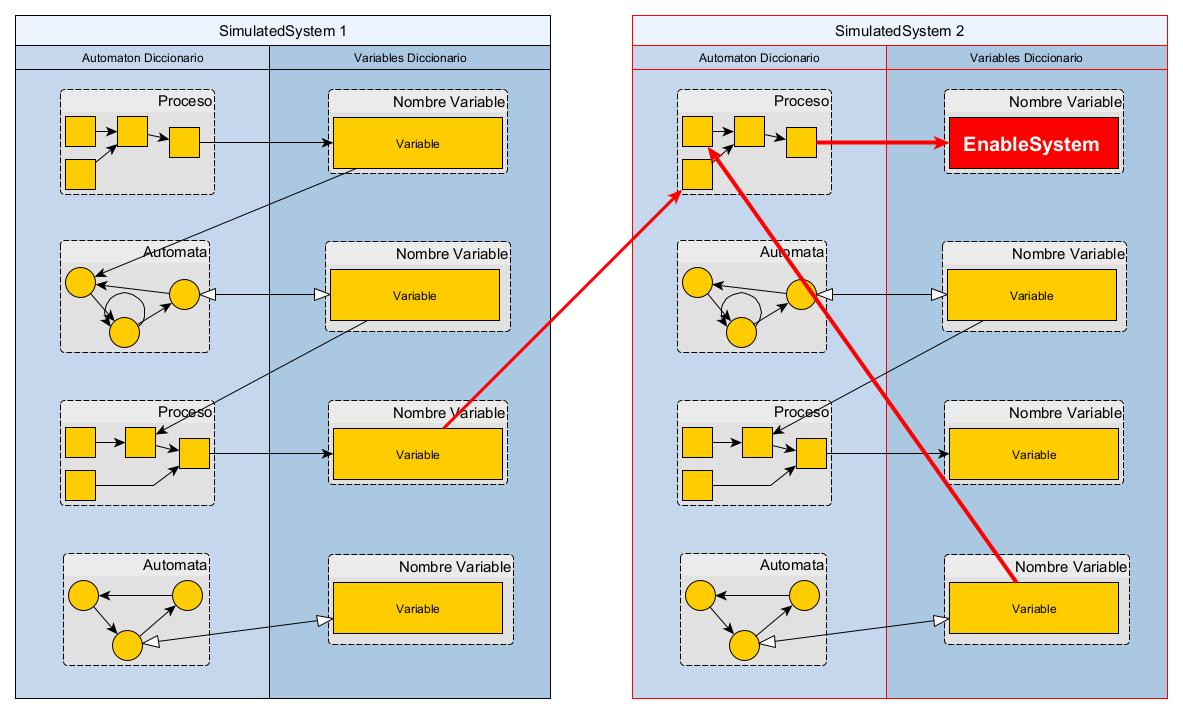
En este ejemplo simbólico mostramos cómo actuaría el sistema al habilitar o deshabilitar el sistema de simulación “SimulatedSystem 2”, dependiendo del estado o valor de la variable local “EnableSystem”, la cual es actualizada por un proceso en el que participan como entradas una variable local al sistema y una variable remota (de otro sistema).
También hemos implementado comandos de código que permiten que los sistemas de simulación o los procesos se carguen inicialmente habilitados o deshabilitados por defecto.
Nuevo evento de inicialización de procesos y de sistemas de simulación
Hemos agregado al lenguaje de alto nivel para la definición de sistemas de simulación un comando que permite que tanto un sistema como un proceso local puedan inicializarse antes de que se ejecuten los “ticks” de los relojes que definen el tiempo de simulación y la cadencia con la cual se generan órdenes de procesamiento para los sistemas.
De esta manera, al cargarse un sistema de simulación (SimulatedSystem) en la máquina virtual del V-indigente, el sistema de simulación puede ser inicializado por medio de la ejecución de un evento.
Otras notas sobre desarrollo no colonizador en Realidad Empoderada, ver:
“Una nueva etapa en el desarrollo de Realidad Empoderada: las percepciones”, Realidad Empoderada
“Desarrollo y avances para la simulación de la praxis social solidaria”, Realidad Empoderada
“Poniéndole movimiento y capacidad de interacción a los avatares”, Realidad Empoderada



Sé el primero en comentar